Yi Zhang

PhD Candidate in Agri-Food Robotics at the University of Cambridge, supervised by Prof. Fulvio Forni and funded by the AgriFoRwArdS CDT and RT Corporation. My research focuses on physics-based, interaction-driven robot control for contact-rich manipulation, with an emphasis on robustness, interpretability, and safe physical interaction.
Before Cambridge, I completed an MSc in Robotics and Autonomous Systems at the University of Lincoln, where I worked on controller-based reinforcement learning for robotic manipulation. I received my BEng in Mechanical Engineering from Osaka University, where I developed tactile-feedback-based cooperative object transportation with mobile robots equipped with flexible tactile sensors under the supervision of Prof. Yuichiro Sueoka and Prof. Koichi Osuka. I also spent a year at UC Berkeley as an exchange student and research assistant, working on autonomous driving interaction prediction as well as combustion modelling and experimentation.
My research interests include robotic manipulation, control theory, human-robot interaction, tactile sensing, and distributed robotic systems.
Projects
Distributed virtual model control for human-robot collaboration
Developed a decentralized, agent-agnostic control framework for shared workspaces with humans and robots. Introduced force-based deadlock detection and negotiation, demonstrating scalability to multiple humans and robots without changing the controller structure.
Zhang, Y., Faris, O., Sirithunge, C., Chu, K.-F., Iida, F., Forni, F. “Distributed Virtual Model Control for Scalable Human-Robot Interaction in Shared Workspace.” ICRA 2026 (IEEE International Conference on Robotics and Automation). paper link
Robust robotic cutting via virtual model control
Designed a virtual-mechanism-based controller for rocking chop motions without explicit trajectory planning, using controlled switching and regulated energy injection to produce stable periodic cutting. Demonstrated robust cutting across vegetables, knife geometries, cutting-board heights, and robot platforms with the same controller structure.
Zhang, Y., Iida, F., Forni, F. “Periodic robust robotic rock chop via virtual model control.” Under review for IJRR, 2025. paper link
Compliant reaching under uncertainties
Developed virtual model controllers that unify motion planning and control for safe reaching in cluttered, partially known environments. Validated virtual mechanism designs on a 17-DoF upper-body humanoid robot and showed predictable and safe behavior under known and unknown obstacles.
Zhang, Y., Larby, D., Iida, F., Forni, F. “Virtual Model Control for Compliant Reaching under Uncertainties.” IROS 2024 (IEEE/RSJ International Conference on Intelligent Robots and Systems). paper link
Passive data-driven iFIR control for robotics
Developed a passive, data-driven velocity controller learned from a few minutes of probing data using VRFT. Experimental validation on the Franka Research 3 showed up to 74.5% reduction in tracking error over an optimized PID baseline and recovery after dynamics changes through re-learning.
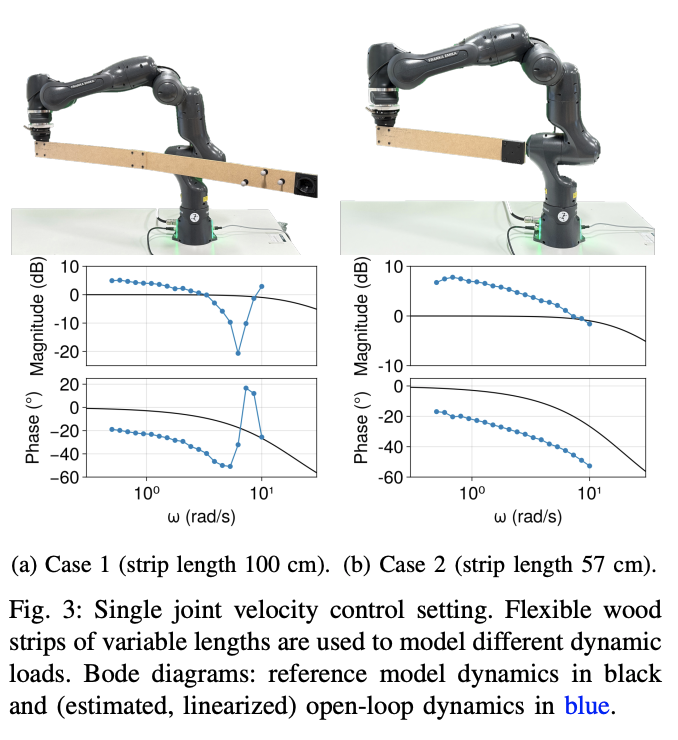
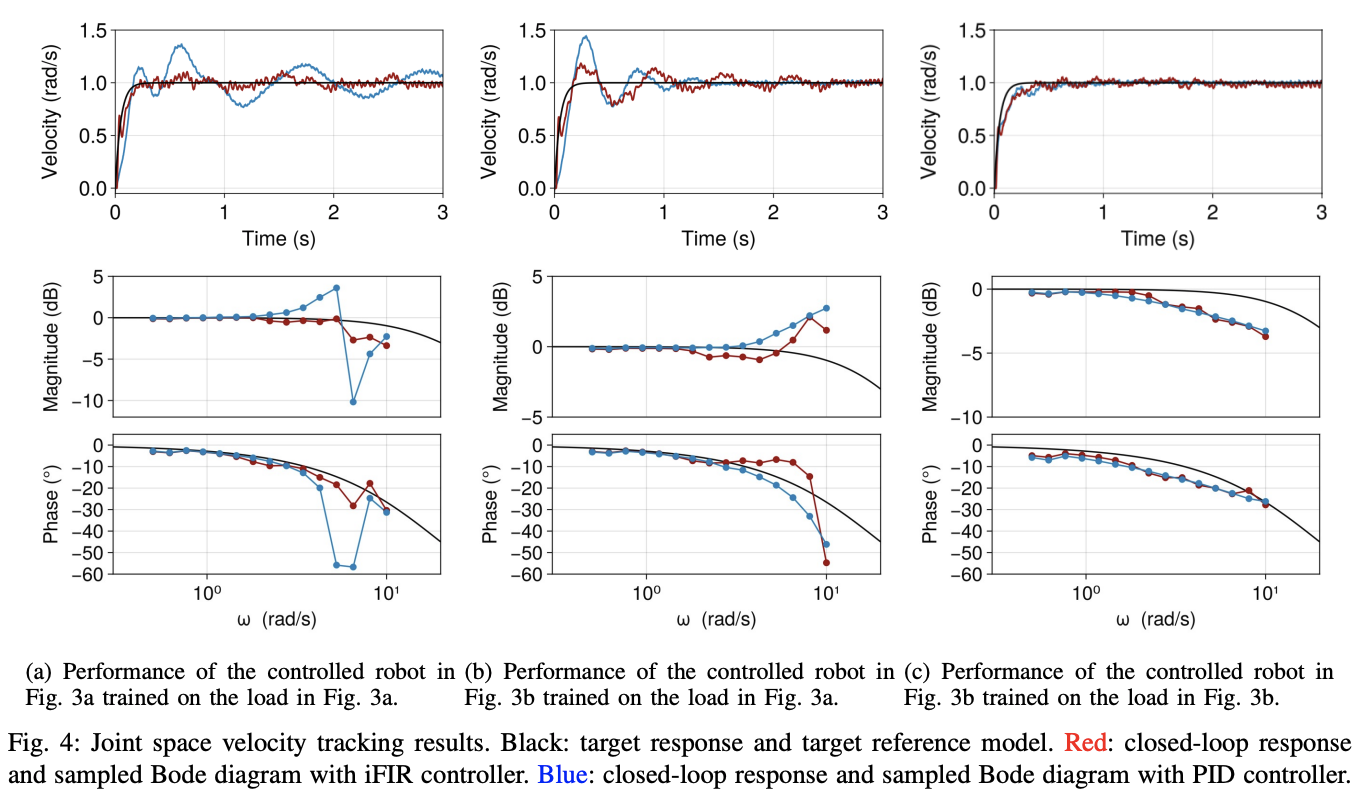
Zhang, Y., Wang, Z., Forni, F. “Passive iFIR filters for data-driven velocity control in robotics.” Under review, 2026. paper link
Related paper: Wang, Z., Zhang, Y., Forni, F. “Dissipative iFIR filters for data-driven design.” European Journal of Control, 2025. paper link
Controller-based reinforcement learning in robotic manipulation
Studied controller-based reinforcement learning during my MSc at the University of Lincoln, combining a roughly tuned controller with TD3 to improve learning efficiency.
Presented at TAROS 2023 / Joint Robotics CDT Annual Conference 2023
Cooperative object transportation with flexible tactile sensors
Developed tactile-feedback-based cooperative object transportation with mobile robots equipped with flexible tactile sensors. This work started from my undergraduate thesis and focused on decentralized cooperative transport with compliant sensing.
Zhang, Y., Sueoka, Y., Ishihara, H., Kawasetsu, T., Osuka, K. “A Decentralized Approach to Cooperative Object Transportation with Robots Equipped with Flexible Tactile Sensors.” DARS 2022 (16th International Symposium on Distributed Autonomous Robotic Systems). paper link
Zhang, Y., Sueoka, Y., Ishihara, H., Kawasetsu, T., Osuka, K. “A Decentralized Approach to Cooperative Object Transportation with Robots Equipped with Flexible Tactile Sensors.” RSJ 2021 (39th annual conference of the Robotics Society of Japan).
Intern at HCI Co., Ltd.
During my internship at HCI Co., Ltd., led the development of a robot hand that can play rock-paper-scissors with people. Trained FANUC robots to complete sequences of tasks with different hands and tools, and worked on programming and electrical wiring with FANUC, Mitsubishi, and Yaskawa systems.

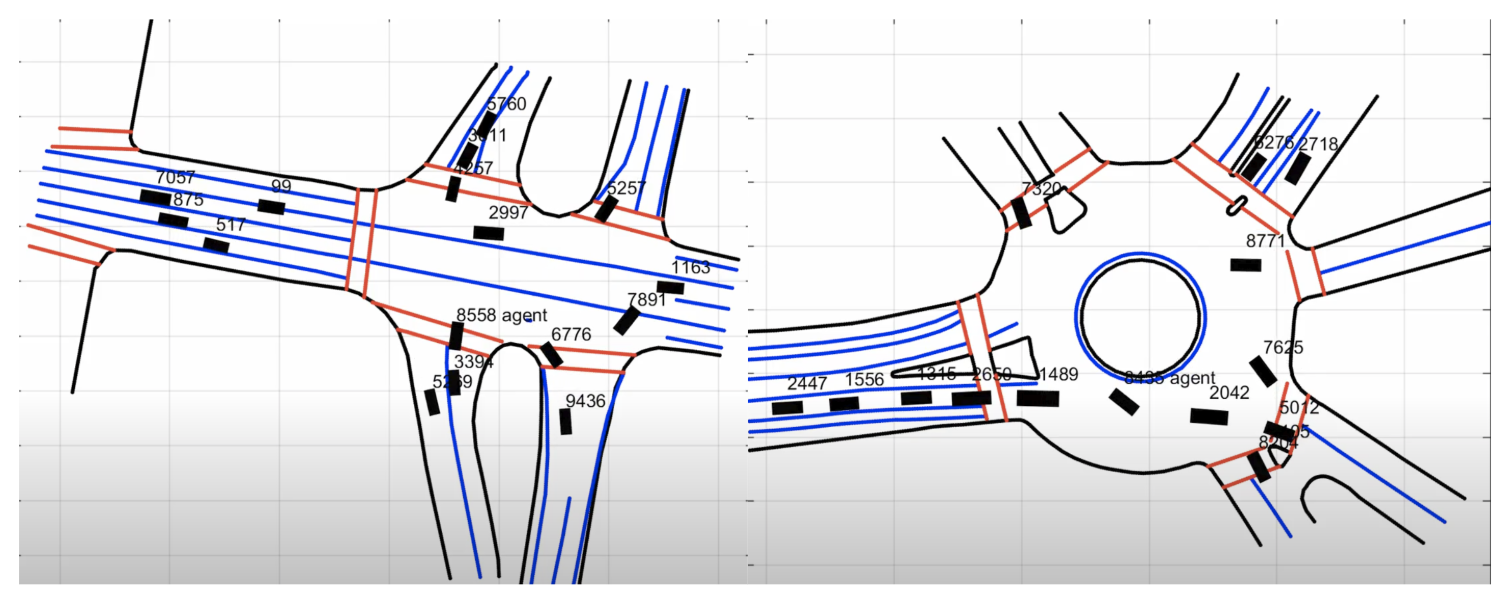
Autonomous driving interaction prediction
Worked at UC Berkeley on interaction prediction for autonomous driving, including debugging and optimizing multi-vehicle prediction code, improving interaction identification, and analyzing challenge results based on the INTERACTION dataset.
Combustion modelling and experimentation
Worked at UC Berkeley on combustion-related projects including argon power cycle experiments, HCCI combustion experiments under different operating conditions, data analysis in MATLAB, and combustion simulation using CONVERGE.